GMP
非原创
好文:https://yizhi.ren/2019/06/03/goscheduler
参考:https://blog.csdn.net/xmcy001122/article/details/119392934
Go 语言的协程 goroutine
Go 为了提供更容易使用的并发方法,使用了 goroutine 和 channel。goroutine 来自协程的概念,让一组可复用的函数运行在一组线程之上,即使有协程阻塞,该线程的其他协程也可以被 runtime 调度,转移到其他可运行的线程上。最关键的是,程序员看不到这些底层的细节,这就降低了编程的难度,提供了更容易的并发。
Go 中,协程被称为 goroutine,它非常轻量,一个 goroutine 只占几 KB,并且这几 KB 就足够 goroutine 运行完,这就能在有限的内存空间内支持大量 goroutine,支持了更多的并发。虽然一个 goroutine 的栈只占几 KB,但实际是可伸缩的,如果需要更多内容,runtime 会自动为 goroutine 分配。
Goroutine 特点:
- 占用内存更小(2KB左右,系统线程需要1-8MB)
- 调度更灵活(runtime 调度)
调度器
被废弃的 goroutine 调度器 - GM模型
Go 目前使用的调度器是 2012 年重新设计的,因为之前的调度器性能存在问题,所以使用 4 年就被废弃了,那么我们先来分析一下被废弃的调度器是如何运作的?
Go的调度程序是Go运行时的一个更重要的方面。运行时会跟踪每个Goroutine,并将安排它们在线程池中运行。goroutines与线程分离(解耦不强绑定),但运行于线程之上。如何有效地将goroutine调度到线程上对于go程序的高性能至关重要。
Goroutines的背后逻辑是:它们能够同时运行,与线程类似,但相比之下非常轻量。因此,程序运行时,Goroutines的个数应该是远大于线程的个数的。
同时多线程在程序中是很有必要的,因为当goroutine调用了一个阻塞的系统调用,比如sleep,那么运行这个goroutine的线程就会被阻塞,那么这时运行时至少应该再创建一个线程来运行别的没有阻塞的goroutine。线程这里可以创建不止一个,可以按需不断地创建,而活跃的线程(处于非阻塞状态的线程)的最大个数存储在变量GOMAXPROCS中。
简要说明
go运行时使用3个结构来跟踪所有成员来支持调度器的工作。
G的结构:
一个G代表一个goroutine,包含当前栈,当前状态和函数体。
|
|
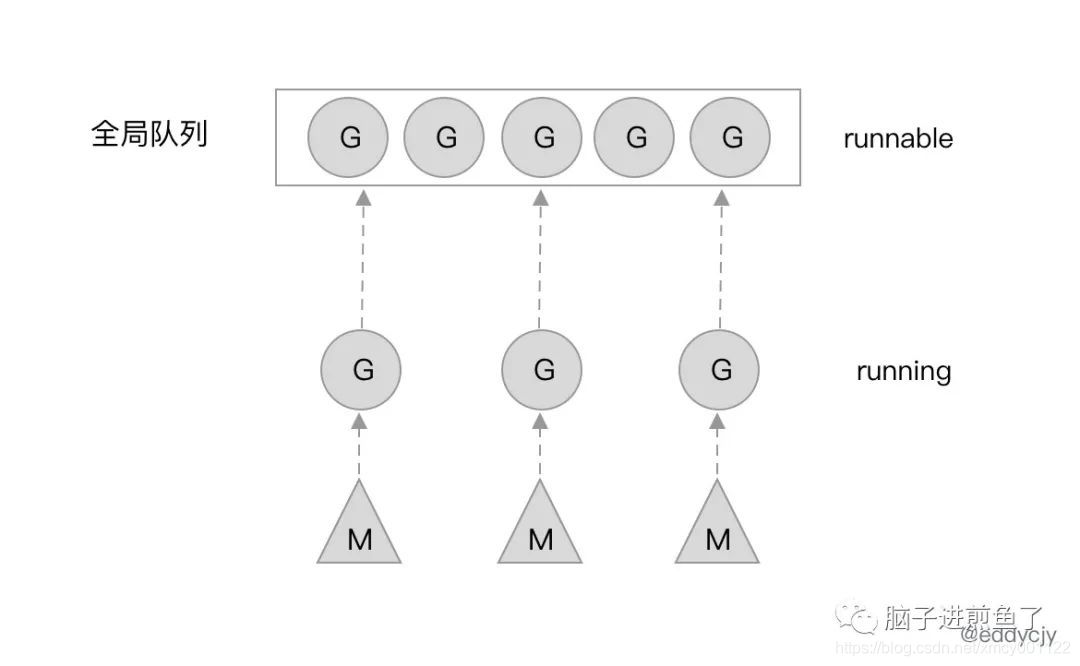
M:
一个M代表一个线程,包含全局G队列,当前G,内存等。
|
|
SCHED:
SCHED是全局单例,用来跟踪G队列和M队列,和维护其他一些信息。
|
|
GM调度模型:
- G:Goroutine 的缩写,每次 go func() 都代表一个 G,无限制,但受内存影响。使用 struct runtime.g,包含了当前 goroutine 的状态、堆栈、上下文
- M:工作线程(OS thread)也被称为 Machine,使用 struct runtime.m,所有 M 是有线程栈的。M 的默认数量限制是 10000(来源),可以通过debug.SetMaxThreads修改。
运行时刚启动时会启动一些G,其中一个负责垃圾回收,其中一个负责调度,其中一个负责用户的入口函数。一开始运行时只有一个M被创建,随后,用户层面的更多G被创建,然后更多的M被创建出来执行更多的G。同时最多同时支持GOMAXPROCS个活跃的线程。
M代表一个线程,M需要从全局G队列中取出一个G并且执行G对应的代码,如果G代码执行阻塞的系统调用,那么会首先从空闲的M队列中取出一个M唤醒,随后执行阻塞调用,陷入阻塞。这么做是因为线程阻塞后,活跃的线程数肯定就小于GOMAXPROCS了,这时我们就可以增加一个活跃的线程以防止当前有G在等在M。
造成阻塞的都是系统调用,在调用返回之前,线程会一直阻塞。但是注意,M不会在channel的操作中阻塞,这是因为操作系统并不知道channel,channel的所有的操作都是有运行时来处理的。所以如果goroutine执行了channel操作,这时goroutine可能会需要阻塞,但是这个阻塞不是操作系统带来的阻塞,因此M并不需要一起阻塞。这种场景下,这个G会被标记为waiting,然后原来执行这个G的M会继续去执行别的G。waiting的G在channel操作完成后会设为runable状态,并把自己放回到原来那个q的队列下,等待空闲的M来执行,不一定是先前那个M了。为了完成g的唤醒,waitting的这个g必然会在wating前先找个地方某个字段某个数组保存。
M 想要执行、放回 G 都必须访问全局 G 队列,并且 M 有多个,即多线程访问同一资源需要加锁进行保证互斥 / 同步,所以全局 G 队列是有互斥锁进行保护的。
老调度器有几个缺点:
- 单一全局互斥锁(Sched.Lock)和集中状态存储。导致所有 goroutine 相关操作,比如:创建、结束、重新调度等都要上锁。
- Goroutine 传递问题。M 经常在 M 之间传递”可运行”的 goroutine,这导致调度延迟增大以及额外的性能损耗(刚创建的 G 放到了全局队列,而不是本地 M 执行,不必要的开销和延迟)
- 每一个M现在都持有一个内存,包括了阻塞状态的M也是持有的。Active状态的M跟总的M个数之比可以达到1:100。这就导致了过多的内存消耗,以及较差的数据局部性。数据局部性怎么理解呢?数据局部性这里是指G当前在M运行后对M的内存进行了预热,后面如果再次调度到同一个M那么可以加速访问,可想而知,因为现在G调度到同一个M的概率不高,所以数据局部性不好。
- 严重的线程阻塞/解锁。在系统调用的情况下,工作线程经常被阻塞和取消阻塞,这增加了很多开销。比如 M 找不到G,此时 M 就会进入频繁阻塞/唤醒来进行检查的逻辑,以便及时发现新的 G 来执行。
GM模型存在的问题在:Dmitry Vyukov “Scalable Go Scheduler Design Doc”有详细描述,推荐阅读
新调度器
调度器细节
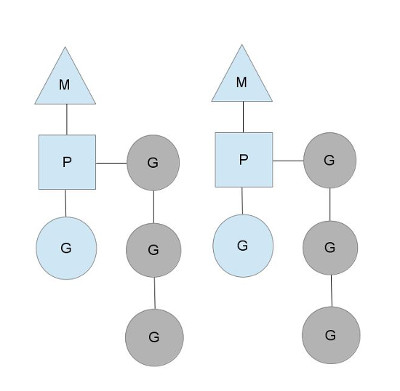
Dmitry Vyukov的方案是引入一个结构P,用来模拟处理器,M依旧表示操作系统线程,G依旧表示一个goroutine。
GOMAXPROCS用来控制P的个数,同时P作为M执行G代码时的必需资源。
新的P结构会带走原来的M和SCHED结构中的一些属性,比如MCache从M移到了P,而G队列也被分成两类,SCHED结构保留全局G队列,同时每个P中都会有一个本地的G队列。
P的本地队列可以解决旧调度器中单一全局锁的问题。注意P的本地G队列还是可能面临一个并发访问的场景,比如下面讲到的窃取算法。为了避免加锁,这里P的本地队列是一个LockFree的队列,窃取G时使用CAS原子操作来完成。关于LockFree和CAS的知识参见Lock-Free。
调用过程
- 创建一个G对象
- 如果还有空闲的的P,创建一个M
- M会启动一个底层线程,循环执行能找到的G
- G的执行顺序是先从本地队列找,本地没找到从全局队列找。一次性转移(全局G个数/P个数)个,再去其它P中找(窃取算法(stealing algorithm))
- 当P执行系统调用即将阻塞时,M会释放P,并进入阻塞,直到系统调用返回时,M会尝试获取空闲的P,有的话继续执行,没有就把G会放到全局G,而M会进入空闲的M队列。 以上的G任务是按照队列顺序执行(也就是go函数的调用顺序)。 另外在启动时会有一个专门的sysmon来监控和管理,记录所有P的G任务计数schedtick。如果某个P的schedtick一直没有递增,说明这个P一直在执行一个G任务,如果超过一定时间就会为G增加标记,并且该G执行非内联函数时中断自己并把自己加到队尾。
新调度器中引入了线程自旋
自旋有好处有坏处,好处是避免线程被阻塞陷入内核,坏处是自旋属于空转,浪费CPU。只能说适度使用自旋是可以带来好处的。新方案在两个地方引入自旋:
1,M找不到P(目的是一有P释放就结合)
2,M找到了P但找不到G(目的是一有runable的G就执行)
- Author: mineor
- Link: https://blog.mineor.xyz/posts/Go/gmp/
- License: This work is under a 知识共享署名-非商业性使用-禁止演绎 4.0 国际许可协议. Kindly fulfill the requirements of the aforementioned License when adapting or creating a derivative of this work.
